反電動勢法永磁直流無刷電機控制系統(tǒng)設(shè)計與研發(fā)
永磁直流無刷電機(BLDC)因其高效率、高功率密度、低維護成本和優(yōu)異的調(diào)速性能,在現(xiàn)代工業(yè)驅(qū)動、消費電子、電動汽車及航空航天等領(lǐng)域得到了廣泛應用。其核心在于通過電子換相替代傳統(tǒng)直流電機的機械換向,而準確可靠的轉(zhuǎn)子位置檢測是實現(xiàn)高性能控制的關(guān)鍵。反電動勢法作為無位置傳感器控制的主流技術(shù)之一,以其成本低、結(jié)構(gòu)簡單、可靠性高的特點,在眾多應用場景中成為首選方案。本文將圍繞基于反電動勢法的永磁直流無刷電機控制系統(tǒng)設(shè)計及其研發(fā)過程展開論述。
一、 系統(tǒng)核心原理:反電動勢法位置檢測
反電動勢法的基本物理原理是:當永磁體轉(zhuǎn)子旋轉(zhuǎn)時,定子不導通相繞組會切割轉(zhuǎn)子磁場,從而產(chǎn)生感應電動勢(即反電動勢)。該反電動勢的過零點與轉(zhuǎn)子磁極位置存在固定的相位關(guān)系。通過檢測三相繞組中反電動勢的過零點,并延遲30°電角度,即可估算出最佳的電子換相時刻,從而驅(qū)動逆變器中的功率開關(guān)管(如MOSFET或IGBT)進行有序切換,實現(xiàn)電機的連續(xù)運轉(zhuǎn)。
該方法在電機中高速運行時效果顯著,但在啟動和低速階段,反電動勢信號幅值小、信噪比低,難以準確檢測,因此需要專門的開環(huán)啟動策略(如外同步加速)將電機牽引至一定轉(zhuǎn)速后,再切換至反電動勢閉環(huán)運行模式。
二、 控制系統(tǒng)硬件架構(gòu)設(shè)計
一套完整的基于反電動勢法的BLDC控制系統(tǒng)硬件平臺通常包括以下核心模塊:
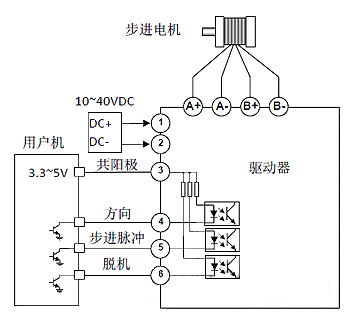
- 功率驅(qū)動模塊:由三相全橋逆變電路、柵極驅(qū)動電路、電流采樣電路及保護電路(過流、過壓、過熱)組成。逆變橋?qū)⒅绷髂妇€電壓轉(zhuǎn)換為三相交流方波(或正弦波)驅(qū)動電機。
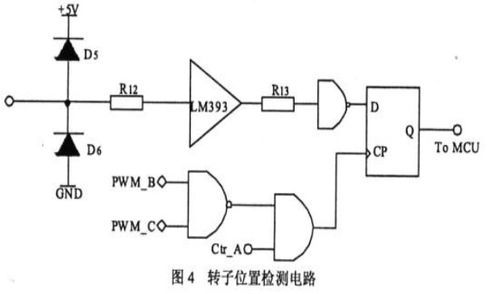
- 信號檢測與調(diào)理模塊:負責檢測三相端電壓。由于電機中性點通常不引出,需通過電阻網(wǎng)絡構(gòu)造虛擬中性點,以獲得反電動勢的參考零點。通過低通濾波器和比較器電路,將微弱的反電動勢信號調(diào)理成清晰的過零檢測(ZCP)方波信號。母線電流、電壓及溫度等模擬量也需進行采樣調(diào)理。
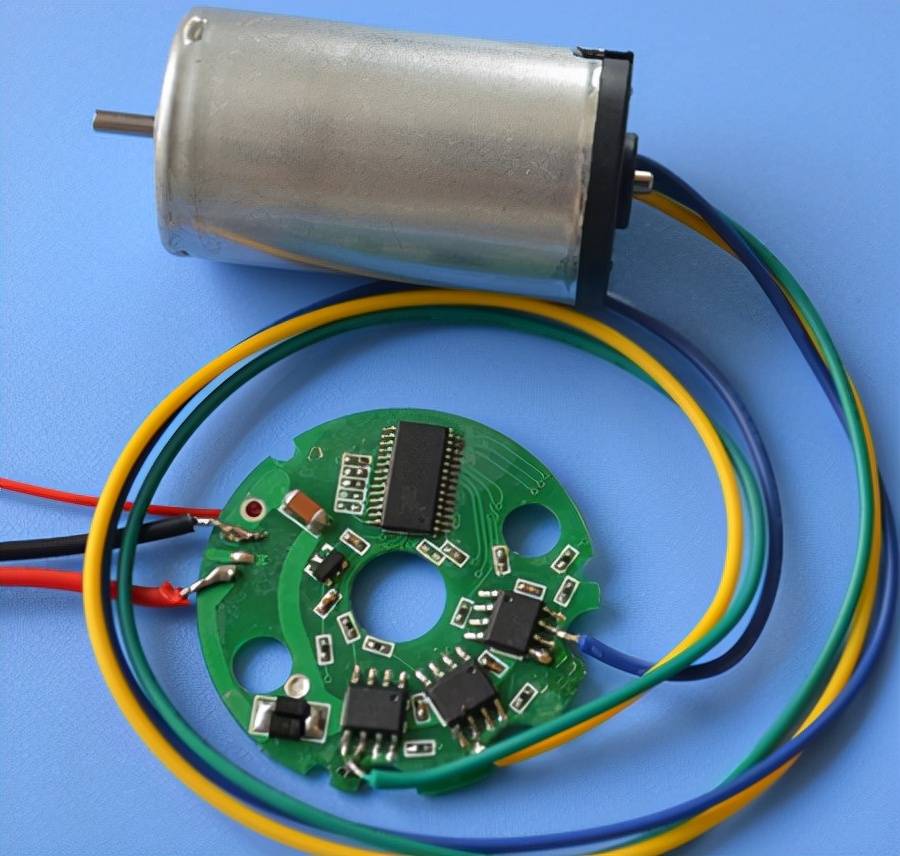
- 核心控制模塊:以高性能微控制器(MCU)或數(shù)字信號處理器(DSP)為核心。它負責捕獲過零信號、計算轉(zhuǎn)速、執(zhí)行換相邏輯、生成PWM驅(qū)動信號、實現(xiàn)速度/電流雙閉環(huán)控制算法,并處理故障保護與通信接口(如CAN、UART)。
三、 控制系統(tǒng)軟件算法設(shè)計
軟件是系統(tǒng)的“大腦”,其設(shè)計至關(guān)重要:
- 啟動算法:通常采用三段式啟動法。控制器按預定順序和頻率強制換相,使轉(zhuǎn)子定位至已知位置。然后,以開環(huán)方式逐步提高換相頻率,使電機加速。當檢測到可靠的反電動勢過零信號且轉(zhuǎn)速達到閾值后,平滑切換到反電動勢法閉環(huán)運行。
- 正常運行算法:在閉環(huán)模式下,MCU實時監(jiān)測過零信號,并以此觸發(fā)換相中斷。結(jié)合測得的換相周期,可以準確計算電機轉(zhuǎn)速。速度環(huán)PI控制器根據(jù)給定轉(zhuǎn)速與實際轉(zhuǎn)速的誤差,輸出電流(或轉(zhuǎn)矩)指令;電流環(huán)則通過調(diào)節(jié)PWM占空比來控制相電流幅值,從而實現(xiàn)精確的調(diào)速與轉(zhuǎn)矩控制。
- 換相補償與抗干擾:由于繞組電感、濾波電路等會引入相位延遲,軟件中需加入換相角超前補償(通常為30°電角度)。需采用數(shù)字濾波(如中值濾波、滑動平均)和軟件消抖策略,以抑制因 PWM 噪聲、續(xù)流二極管導通等引起的過零信號毛刺,確保換相準確性。
四、 系統(tǒng)研發(fā)流程與關(guān)鍵技術(shù)挑戰(zhàn)
從研發(fā)角度看,一個成功的BLDC控制系統(tǒng)項目需遵循系統(tǒng)化的流程:需求分析→方案設(shè)計→硬件選型與PCB設(shè)計→底層驅(qū)動與核心算法軟件編寫→硬件軟件聯(lián)合調(diào)試→性能優(yōu)化與可靠性測試。
研發(fā)過程中的關(guān)鍵技術(shù)挑戰(zhàn)包括:
- 低速及靜默區(qū)性能優(yōu)化:改善啟動平滑性與成功率,研究在極低速下的新型位置觀測器(如滑模觀測器、高頻注入法)與反電動勢法的融合策略。
- 寬范圍調(diào)速與動態(tài)響應:優(yōu)化PI參數(shù)自整定算法,提升系統(tǒng)在負載突變和速度指令快速變化時的動態(tài)性能與穩(wěn)定性。
- 電磁兼容性(EMC)設(shè)計:功率電路的高速開關(guān)會產(chǎn)生嚴重的電磁干擾,影響敏感的檢測電路。需在PCB布局布線、濾波、屏蔽等方面精心設(shè)計,以滿足相關(guān)EMC標準。
- 功能安全與可靠性:增加冗余檢測、故障診斷(如缺相、堵轉(zhuǎn)、過溫)及容錯運行機制,提升系統(tǒng)在復雜工業(yè)環(huán)境下的魯棒性。
五、 與展望
基于反電動勢法的永磁直流無刷電機控制系統(tǒng),以其優(yōu)異的性價比和可靠性,在成本敏感且對性能要求適中的領(lǐng)域具有強大競爭力。隨著微處理器算力的不斷提升和先進控制理論的引入,反電動勢法的檢測精度和應用范圍(尤其是向更低速域擴展)正在持續(xù)改善。該技術(shù)將與更智能的算法(如人工智能參數(shù)整定)、更集化的芯片方案(如集成了驅(qū)動與控制器功能的SOC)相結(jié)合,推動BLDC電機控制系統(tǒng)向更高性能、更小型化、更智能化的方向持續(xù)演進,賦能更廣泛的工業(yè)和民用領(lǐng)域。
如若轉(zhuǎn)載,請注明出處:http://www.appsrainbow.cn/product/25.html
更新時間:2026-06-12 22:40:57